
|
|
|
|
Главная Переработка нефти и газа жидкости из рабочего цилиндра в аккумулятор. Под действием веса штанг жидкость поступает на прием силового насоса. Для поддержания давления жидкости и газа в аккумуляторе имеются компрессор 7 и насос 6. По схеме АГН уравновешивание происходит за счет веса НКТ. Для этого используется уравновешивающий цилиндр 8, в котором на поршень 9 подвешены НКТ. Установки с гидроприводом обеспечивают большие длины хода глубинного насоса, легкость регулирования режима работы и малую металлоемкость. Параметры установки АГН-Л: длина хода точки подвеса штанг 2,2 м; нагрузка до 60 кН; масса 1550 кг. В последнее время гидрофицированный привод ЛП-114 предложен заводом "Мотовилиха" (г. Пермь). Такие приводы работают в Западной Сибири (г. Сургут). Уравновешивание производится гидроаккумулятором. Параметры установки ЛП-114: длина хода точки подвеса штанг 2,5 м; нагрузка до 80 кН; масса 1980 кг. Схема ЛП-114 соответствует схеме (см. рис. 5.5, а). Станки-качалки с одноплечным балансиром В связи с появлением на промыслах большого количества зарубежного оборудования можно встретить станки-качалки с одноплечным балансиром типа МАРК фирмы "Lufkin" (США), а также отечественных производителей (привод ПШГНО 6-2,5, Уралтрансмаш, г. Екатеринбург) (рис. 5.6). Особенностью подобных приводов является использование кинематической схемы с одноплечным балансиром. Подобное выполнение станков-качалок обусловлено рядом причин. Так, эти станки-качалки имеют более благоприятный закон движения точки подвеса штанг, позволяющий несколько уменьшить динамические нагрузки на штанговую колонну. Если сравнить два станка-качалки с одинаковыми длинами и соотношениями кинематических звеньев, один из которых обхч-ный станок-качалка, а второй - с одноплечным балансиром, то у последнего максимальные нагрузки в точке подвеса штанг будут несколько меньше (около 8-10 %, по данным [2]). Одно-плечный станок-качалка имеет также более пологую кривую скорости точки подвеса штанг, позволяющую существенно (около 35 %) снизить амплитуду колебаний штанг, а следовательно, и их динамическое нагружение и тем самым увеличить срок работы штанговой колонны. Рассмотрим последний вывод более подробно. Известно, что вследствие упругих деформаций штанг и труб, после начала движения точки подвеса штанг вверх, плун- 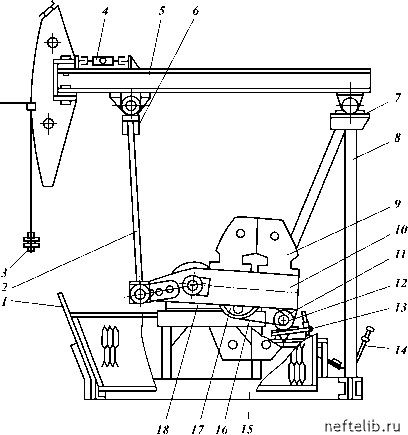 Рис. 5.6. Станок-качалка с одноплечным балансиром: 1 - ограждение; 2 - шатун; 3 - подвеска устьевого штока; 4 - стяжка; 5 - балансир с опорой; 6 - траверса; 7 - винт установочный; 8 - стойка; 9 - про-тивовес; 10 - кривошип; 11 - электродвигатель; 12 - шкив ведущий; l3 -плитка поворотная; 14 - рычаг тормоза; 15 - рама; 16 - ремень; 17 - шкив ведомый; 18 - редуктор жер остается неподвижным относительно цилиндра. После того как произойдет вытяжка штанг и сокращение труб, движение от ТПШ передается плунжеру, причем за это время ТПШ успевает набрать определенную скорость. В р езультате плунжер резко страгивается с места и нагружается столбом жидкости в трубах в виде импульса силы, т.е. возникают про- дольные свободные колебания системы штанговая колонна -столб жидкости. У станков-качалок с одноплечным балансиром в сравнении с обычными станками-качалками ТПШ в момент страгивания плунжера успевает набрать меньшую скорость, что, как уже указывалось, позволяет существенно снизить амплитуду колебаний штанг и уменьшить их динамическое на-гружение. Интересно отметить, что у подобных станков-качалок направление вращения кривошипа обратное, т.е. против часовой стрелки (устье слева), что также позволяет несколько уменьшить динамические нагрузки. Другим достоинством подобных станков-качалок является их компактность, а следовательно, и меньший вес, в результате чего их применение более предпочтительно при больших нагрузках на полированный шток. Однако они имеют и недостатки, препятствующие их широкому распространению. Это, прежде всего, их малая боковая устойчивость, т.е. большая высота при малой ширине. У подобных станков-качалок кривошипы с грузами находятся в опасной близости от устья скважины, что затрудняет их техническое обслуживание и ремонт. При балансировке подобных станков-качалок требуется большой вес кривошипных грузов, так как вес самого кривошипа приложен к балансиру со стороны скважины по отношению к стойке балансира. Станки-качалки с дезаксиальным кривошипно-шатунным механизмом Наряду с аксиальными (обычными) кривошипно-шатунными механизмами (станки-качалки типа СК), у нас в стране выпускаются станки-качалки с дезаксиальной схемой (типа СКД). За рубежом (в особенности в США) практически все станки-качалки выпускаются с небольшим дезаксиалом. Дезаксиал n определяется местом расположения кривошипного центра (точки 0) относительно прямой В1В2 (рис. 5.7), где В1 и В2 - крайнее верхнее и нижнее положения кривошипа. Если точка 0 расположена на прямой В1В2, то механизм аксиальный (обычный), если справа от прямой В1В2, то механизм с отрицательным дезаксиалом, если слева, то механизм с положительным дезаксиалом. Основное их отличие в том, что у аксиального станка-качалки время хода ТПШ вверх и вниз равно. Поэтому такие станки-качалки называют симметричными. Однако нагружение ТПШ за время хода вверх и вниз 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 [ 31 ] 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 |
||
 |
 |
