
|
|
|
|
Главная Переработка нефти и газа б) все они остаются внутри некоторого ограниченного объема фазового пространства. В случае неавтономных уравнений хаос возможен и в системах второго порядка. Так, в некоторой области изменения параметров хаотичными могут стать колебания нелинейного осциллятора под воздействием внешней периодической силы, описываемые уравнением Г. Дюффинга (G. Duffing, 1918 г.) (1.9) x + Sxc + ax + bx3 = F cos cot. Заметим, что формально неавтономное уравнение второго порядка можно записать в виде системы трех автономных уравнений. Так, (1.9) может быть переписано в виде Sy - ax - bx + F cos z, =c . Это в какой-то мере объясняет возникновение хаотических движений в неавтономных системах второго порядка. То, что периодическое возмущение может привести к случайному поведению, иллюстрирует простая механическая система, представляющая собой шарик в плоском ящике с неровным дном (рис. 1.13). 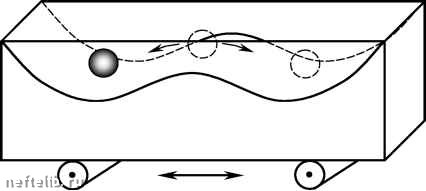 Рис. 1.13. Хаотическое движение шарика в ящике с неровным дном Когда этот прибор покоится, шарик имеет два устойчивых и одно неустойчивое положения равновесия. Если же ящик совершает горизонтальные периодические движения достаточно большой амплитуды, то шарик начинает беспорядочно перепрыгивать из одной ямы в другую. «Разбе-гание» траекторий в этой системе связано с наличием неустойчивой точки равновесия на вершине среднего холмика. : -bx + a n > 1, (1.12) dt [1 + xn (t -t) описывающего процессы регенерации больных кровяных шариков при хронической лейкемии [20]. Примером разностного уравнения, имеющего хаотические решения, является логистическое отображение xn+1 =mxn (1 - xn), (1.13) введенное в 1845 г. П. Ф. Ферхюльстом для описания динамики популяций в закрытой среде (xn - относительная численность особей популяции в n-й год). Линейный член в правой части (1.13) описывает рост или рождение, Если рассматривать уравнения с отклоняющимся аргументом, то хаотические решения могут иметь место и в случае более простых систем - обыкновенных дифференциальных уравнений первого порядка = f (x, x(t-t)) (1.10) и даже алгебраических уравнений x = f (x(t), x(t -t)) где xn = x(nt), n = 0, 1, 2,..., t> 0 - временная задержка (лаг). Введение отклоняющегося аргумента в дифференциальные уравнения позволяет уменьшить их размерность и тем самым избежать трудностей при идентификации математических моделей, содержащих ненаблюдаемые (т. е. не измеряемые напрямую) физические переменные (см. также раздел 3.1). Следовательно, уравнения с отклоняющимися аргументами являются образами некоторых систем более высокой размерности, наподобие двумерных теней от объемных предметов на стенах пещеры Платона. Поэтому неудивительно, что в случае дифференциально-разностных и разностных уравнений хаос может проявиться и в системах, порядок которых меньше не только трех, но и двух. Вспомним также о том, что порядок обыкновенного дифференциального уравнения совпадает с числом начальных условий, необходимых для однозначного определения его решения. Поскольку постановка начальной задачи для уравнения (1.10) требует задания значений x на всем интервале, содержащем бесконечно большое число точек, то порядок уравнения с отклоняющимся аргументом можно считать (по этому критерию) бесконечно большим. Это является еще одним объяснением возможности возникновения хаоса в системах с запаздыванием. В качестве примера уравнения вида (1.10), допускающего хаотические решения, приведем уравнение Маки-Гласса (M. C. Mackey, L. Glass, 1977 г.) x(t - t) а нелинейный член ответственен за ограничение роста, связанное с недостатком энергетических или пищевых ресурсов (величина 1 - xn пропорциональна «свободной» части жизненного пространства). Модель (1.13) весьма полезна для иллюстрации некоторых закономерностей перехода к хаосу, поэтому исследуем ее более подробно. Графическое решение уравнения (1.13) может быть получено путем построения графика функции f (xn ) = xn (1 - xn) в координатах (xn, xn+1) (рис. 1.14). Динамика системы (1.13) изобразится ломаной кривой 123456..., которая «притягивается» к точке равновесия P (рис. 1.14). хи+1 I 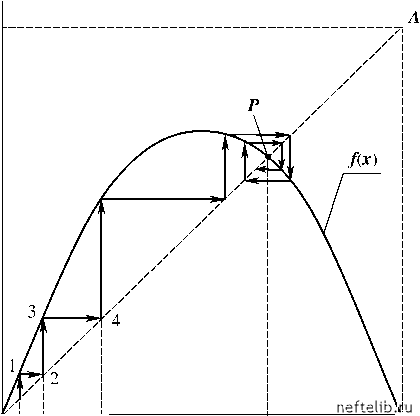 0 Х0 Х1 х2 1 Xn Рис. 1.14. Логистическое отображение Отметим, что точки равновесия x* определяются из решения уравнения x*= f (x*) = x*(1 - x*) . Для функции, представленной на рис. 1.14, это уравнение имеет два решения: x*= 0 и x*= 1 - -, 0 1 2 3 4 5 6 7 8 9 10 11 [ 12 ] 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 |
||
 |
 |
